
| Version 1 (modified by , 18 years ago) ( diff ) |
|---|
Writing efficient TLM-T SystemC simulation models for SoCLib
Authors : Alain Greiner, François Pécheux, Emmanuel Viaud, Nicolas Pouillon
A) Introduction
This manual describes the modeling rules for writing TLM-T SystemC simulation models for SoCLib. Those rules enforce the PDES (Parallel Discrete Event Simulation) principles. Each PDES process involved in the simulation has is own, local time, and processes synchronize through timed messages. Models complying with those rules can be used with the "standard" OSCI simulation engine (SystemC 2.x), but can be used also with others simulation engines, especially distributed, parallelized simulation engines.
Besides you may also want to follow the general SoCLib rules.
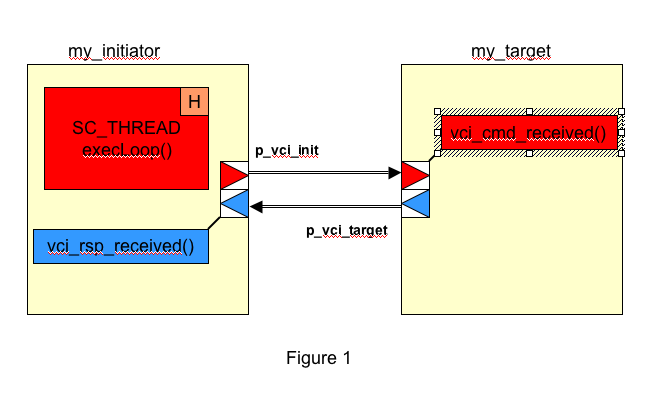
B) VCI Communication between a single initiator and a single target
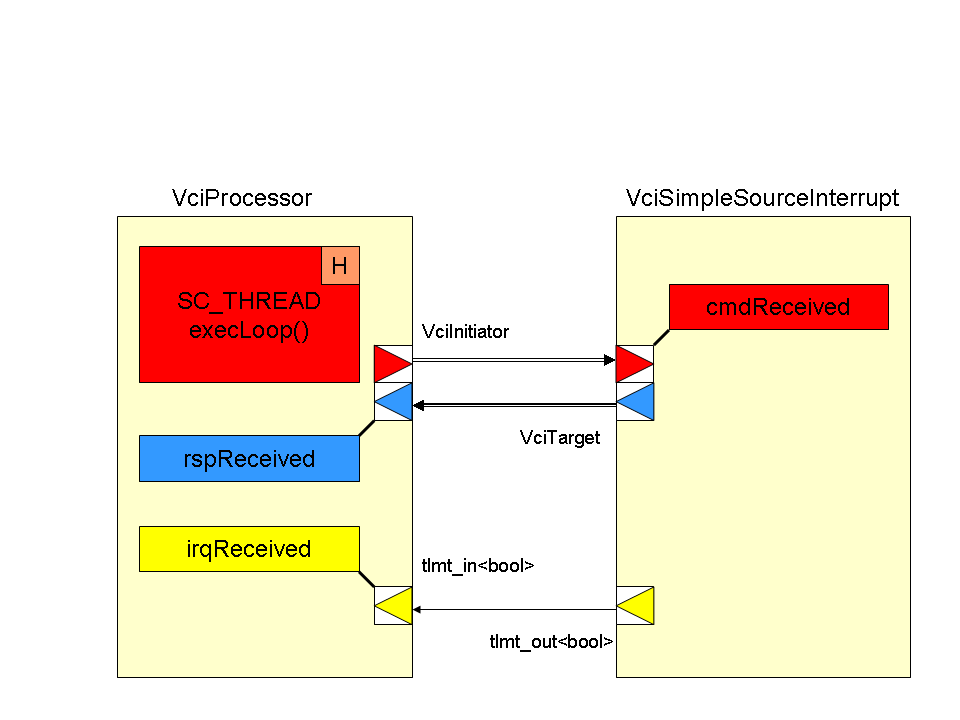
Figure 1 presents a minimal system containing one single initiator, and a single target. In the proposed example, the initiator module doesn't contains any parallelism, and can be modeled by a single SC_THREAD, describing a single PDES process. The activity of the my_initiator module is described by the SC_THREAD execLoop(), that contain an infinite loop. The variable m_time represents the PDES process local time.
Contrary to the initiator, the target module has a purely reactive behaviour. There is no need to use a SC_THREAD to describe the target behaviour : A simple method is enough.
The VCI communication channel is a point-to-point bi-directionnal channel, encapsulating two separated uni-directionnal channels : one to transmit the VCI command packet, one to transmit the VCI response packet.
C) Initiator Modeling
In the proposed example, the initiator module is modeled by the my_initiator class. This class inherit the Tlmt::BaseModule' class, that is the basis for all TLM-T modules. As there is only one thread in my_initiator, there is only one member variable time of type tlmt_time. This object can be accessed through the getTime(), addTime() and setTime() methods. The execLoop() method, describing the initiator activity must be declared as a member function of the my_initiator class.
C.1) Sending a VCI command packet
The class my_initiator must contain a member variable p_vci, of type VciInitiatorPort. This object has a template parameter <vci_param> defining the widths of the VCI ADRESS & DATA fields.
To send a VCI command packet, the execLoop() method must use the cmdSend() method, that is a member function of the p_vci port. The prototype is the following:
void cmdSend( vci_cmd_t *cmd, // VCI command packet
sc_time time); // initiator local time
The informations transported by a VCI command packet are defined below:
class vci_cmd_t {
vci_command_t cmd; // VCI transaction type
vci_address_t *address; // pointer to an array of addresses on the target side
uint32_t *be; // pointer to an array of byte_enable signals
bool contig; // contiguous addresses (when true)
vci_data_t *buf; // pointer to the local buffer on the initiator
uint32_t length; // number of words in the packet
bool eop; // end of packet marker
uint32_t srcid; // SRCID VCI
uint32_t trdid; // TRDID VCI
uint32_t pktid; // PKTID VCI
}
C.2) Receiving a VCI response packet
C.3) Initiator Constructor
C.4) Lookahead parameter
C.5) TLM-T initiator example
template <typename vci_param>
class my_initiator : Tlmt::BaseModule {
public:
VciInitiatorPort <vci_param> p_vci;
//////// constructor
my_initiator ( sc_module_name name,
uint32_t initiatorIndex
uint32_t lookahead) :
p_vci(“vci”, this, &my_initiator::rspReceived, &m_time) ,
BaseModule(name),
m_time(0),
{
m_index = InitiatorIndex;
m_lookahed = lookahead;
m_counter = 0;
SC_THREAD(execLoop);
} // end constructor
private:
tlmt_Time m_time; // local clock
uint32_t m_index; // initiator index
uint32_t m_counter; // iteration counter
uint32_t m_lookahed; // lookahead value
vci_param::data_t m_data[8]; // local buffer
vci_cmd_t m_cmd; // paquet VCI commande
//////// thread
void execLoop()
{
while(1) {
…
m_cmd.cmd = VCI_CMD_READ;
p_vci.cmdSend(&m_cmd, m_time.get_time()); // lecture bloquante
p_vci.wait();
…
m_cmd.cmd = VCI_CMD_WRITE;
p_vci.send(VCI_CMD_WRITE,…);
p_vci.cmdSend(&m_cmd, m_time.get_time()); // écriture non bloquante
...
// lookahead management
m_counter++ ;
if (m_counter >= m_lookahead) {
m_counter = 0 ;
wait(SC_ZERO_TIME) ;
} // end if
m_time.addtime(1) ;
} // end while
} // end execLoop()
//////////////// call-back function
void rspReceived(vci_cmd_t *cmd, sc_time rsp_time)
{
if(cmd == VCI_CMD_READ) {
m_time.set_time(rsp_time + length);
p_vci.notify() ;
}
} // end rspReceived()
} // end class my_initiator
D) Target Modeling
D.1) Receiving a VCI command packet
D.2) Sending a VCI response packet
D.3) Target Constructor
D4) TLM-T target example
Cible TLM-T
template <typename vci_param>
class my_target : Tlmt::BaseModule {
public:
VciTargetPort<vci_param> p_vci;
////////////// constructor
my_target ( sc_module_name name,
uint32_t targetIndex,
sc_time latency):
p_vci(“vci”,this, &my_target::cmdReceived),
BaseModule(name)
{
m_latency = latency;
m_index = targetIndex;
} // end constructor
private:
vci_param::data_t m_data[8]; // local buffer
sc_time m_latency; // target latency
uint32_t m_index; // target index
vci_rsp_t m_rsp; // paquet VCI réponse
/////////////// call-back function
sc_time cmdReceived( vci_cmd_t *cmd,
sc_time cmd_time)
{
if(cmd->cmd == VCI_CMD_WRITE) {
for(int i = 0 ; i < length ; i++) m_data[i] = cmd->buf[i];
}
if(cmd->cmd == VCI_CMD_READ) {
for(int i = 0 ; i < length ; i++) cmd->buf[i] = m_data[i];
}
m_rsp.srcid = cmd->srcid;
m_rsp.trdid = cmd->trdid;
m_rsp.pktid = cmd>pktid;
m_rsp.length = cmd->length;
m_rsp.error = 0;
rsp_time = cmd_time + latency;
p_vci.rspSend(&m_rsp, rsp_time) ;
return (rsp_time + (sc_time)cmd->length);
} // end cmdReceived()
} // end class my_target
As VCI signals can have variable widths, all VCI components must be defined with templates. The caba/interface/vci_param.h file contains the definition of the VCI parameters object. This object must be passed as a template parameter to the component.
A typical VCI component declaration is:
#include "caba/util/base_module.h"
#include "caba/interface/vci_target.h"
namespace soclib { namespace caba {
template<typename vci_params>
class VciExampleModule
: soclib::caba::BaseModule
{
};
}}
The SystemC top cell defining the system architecture must include the following file, defining the advanced VCI signals :
A SoCLib hardware component that has no VCI interface should use a dedicated VCI wrapper in order to be connected to the VCI interconnect.
B3) Address space segmentation
In a shared memory architecture, the address space segmentation (or memory map) is a global characteristic of the system. This memory map must be defined by the system designer, and is used by both software, and hardware components.
Most hardware components use this memory map:
- VCI interconnect components contain a routing table used to decode the VCI address MSB bits and route VCI commands to the proper targets.
- VCI target components must be able to check for segmentation violation when receiving a command packet. Therefore, the base address and size of the segment allocated to a given VCI target must be known by this target.
- A cache controller supporting uncached segments can contain a cacheability table addressed by the VCI address MSB bits.
In order to simplify the memory map definition, and the hardware component configuration, a generic object, called mapping table has been defined in common/mapping_table.h. This is an associative table of memory segments. Any segment must be allocated to one single VCI target. The segment object is defined in common/segment.h, and contains five attributes:
const std::string m_name; // segment's name addr_t m_base_address; // base address size_t m_size; // size (bytes) IntTab m_target_index; // VCI target index bool m_cacheability; // cacheable
Any hardware component using the memory map should have a constant reference to the mapping table as constructor argument.
B4) Component definition
The component XXX.h file contains the following informations
Interface definition A typical VCI target component will contain the following ports:
sc_in<bool> p_resetn; sc_in<bool> p_clk; soclib::caba::VciTarget<vci_param> p_vci;
Internal registers definition
All internal registers should be defined with the sc_signal type.
This point is a bit tricky: It allows the model designer to benefit from the delayed update
mechanism associated by SystemC to the sc_signal type. When a single module contains several
interacting FSMs, it helps to write the Transition(), as the registers values are not updated
until the exit from the transition function. Conversely, any member variable declared with the
sc_signal type is considered as a register.
A typical VCI target will contain the following registers :
sc_signal<int> r_vci_fsm; sc_signal<typename vci_param::trdid_t> r_buf_trdid; sc_signal<typename vci_param::pktid_t> r_buf_srcid; sc_signal<typename vci_param::srcid_t> r_buf_srcid;
typename vci_param::trdid_t and others are generically-defined VCI field types
Structural parameters definition
All structural parameters should be be defined as member variables. The values are generally defined by a constructor argument. Instance name is stored in soclib::common::BaseModule, inherited by soclib::caba::BaseModule. For example, a VCI target will contain a reference to the the assigned segment, in order to check possible segmentation errors during execution.
const soclib::common::Segment m_segment;
B5) Constructor & destructor
Any hardware component must have an instance name, and most SoCLib component must have a VCI index. Moreover, generic simulation models can have structural parameters. The parameter values must be defined as constructor arguments, and used by the constructor to configure the hardware ressources. A constructor argument frequently used is a reference on the soclib::common::MappingTable, that defines the segmentation of the system address space. A typical VCI component will have the following constructor arguments:
VciExampleModule(
sc_module_name insname,
const soclib::common::IntTab &index,
const soclib::common::MappingTable &mt);
In this example, the first argument is the instance name, the second argument is the VCI target index, and the third argument is the mapping table.
Moreover, the constructor must define the sensitivity list of the Transition(), genMoore() and genMealy() methods, that are described below.
- sensitivity list of the transition() method contains only the clock rising edge.
- sensitivity list of the genMoore() method contains only the clock falling edge.
- sensitivity list of the genMealy() method contains the clock falling edge, as well as all input ports thare in the support of the Mealy generation function.
Be careful: the constructor should NOT initialize the registers. The register initialization must be an hardware mechanism explicitly described in the Transition function on reset condition.
B6) member functions
The component behaviour is described by simple member functions. The type ot those methods (Transition, genMoore, or genMealy) is defined by the sensitivity lists, as specified in B5.
transition() method
For each hardware component, there is only one Transition() method. It is called
once per cycle, as the sensitivity list contains only the clock rising edge. This method
computes the next values of the registers (variables that have the sc_signal type).
No output port can be assigned in this method. Each register should be assigned only once.
genMoore() method
For each hardware component, there is only one genMoore() method. It is called once
per cycle, as the sensitivity list contains only the clock falling edge. This method computes
the values of the Moore output ports. (variables that have the sc_out type).
No register can be assigned in this method. Each output port can be assigned only once.
No input port can be read in this method
genMealy() methods
For each hardware component, there is zero, one or several genMealy() methods (it can be useful
to have one separated gemealy() method for each output port). These methods can be called several times per cycle. The sensitivity list can contain several input ports. This method computes the Mealy values of the ouput ports, using only the register values and the input ports values.
No register can be assigned in this method. Each output port can be assigned only once.
C) Complete example
C1) Component definition
Let's take the soclib::caba::VciLocks component definition and comment it.
#include <systemc.h>
#include "caba/util/base_module.h"
#include "caba/interface/vci_target.h"
#include "common/mapping_table.h"
// Have this component in the soclib::caba namespace
namespace soclib { namespace caba {
// Here we pass the VCI parameters as a template argument. This is intended because VCI parameters
// change data type widths, therefore change some compile-time intrinsics
template<typename vci_param>
class VciLocks
: public soclib::caba::BaseModule
{
// We have only one FSM in this component. It handles the
// VCI target port. The states are:
enum vci_target_fsm_state_e {
IDLE,
WRITE_RSP,
READ_RSP,
ERROR_RSP,
};
// The register holding the FSM state:
sc_signal<int> r_vci_fsm;
// Some registers used to save useful data between command & response
sc_signal<typename vci_param::srcid_t> r_buf_srcid;
sc_signal<typename vci_param::trdid_t> r_buf_trdid;
sc_signal<typename vci_param::pktid_t> r_buf_pktid;
sc_signal<typename vci_param::eop_t> r_buf_eop;
sc_signal<bool> r_buf_value;
// Pointer on the table of locks (allocated in the constructor)
sc_signal<bool> *r_contents;
// The segment assigned to this peripheral
soclib::common::Segment m_segment;
protected:
// Mandatory SystemC construct
SC_HAS_PROCESS(VciLocks);
public:
// The ports
sc_in<bool> p_resetn;
sc_in<bool> p_clk;
soclib::caba::VciTarget<vci_param> p_vci;
// Constructor & descructor, explained above
VciLocks(
sc_module_name insname,
const soclib::common::IntTab &index,
const soclib::common::MappingTable &mt);
~VciLocks();
private:
// The FSM functions
void transition();
void genMoore();
};
// Namespace closing
}}
C2) Component implementation
Here is the soclib::caba::VciLocks component implementation:
#include "caba/target/vci_locks.h"
// Namespace, again
namespace soclib { namespace caba {
// This macro is an helper function to factor out the template parameters
// This is useful in two ways:
// * It makes the syntax clearer
// * It makes template parameters changes easier (only one line to change them all)
// x is the method's return value
#define tmpl(x) template<typename vci_param> x VciLocks<vci_param>
// The /**/ is a hack to pass no argument to a macro taking one. (constructor has no
// return value in C++)
tmpl(/**/)::VciLocks(
sc_module_name insname,
const soclib::common::IntTab &index,
const soclib::common::MappingTable &mt)
// This is the C++ construct for parent construction and
// member variables initialization.
// We initialize the BaseModule with the component's name
: soclib::caba::BaseModule(insname),
// and get the segment from the mapping table and our index
m_segment(mt.getSegment(index))
{
// There is one lock every 32-bit word in memory. We
// allocate an array of bool for the locks
r_contents = new sc_signal<bool>[m_segment.size()/4];
// Sensitivity list for transition() and genMoore(), no genMealy()
// in this component
SC_METHOD(transition);
dont_initialize();
sensitive << p_clk.pos();
SC_METHOD(genMoore);
dont_initialize();
sensitive << p_clk.neg();
}
tmpl(/**/)::~VciLocks()
{
// Here we must delete dynamically-allocated data...
delete [] r_contents;
}
tmpl(void)::transition()
{
// On reset condition, we initialize the component,
// from FSMs to internal data.
if (!p_resetn) {
for (size_t i=0; i<m_segment.size()/4; ++i)
r_contents[i] = false;
r_vci_fsm = IDLE;
return;
}
// We are not on reset case.
// Take the address, transform it into an index in our locks table.
typename vci_param::addr_t address = p_vci.address.read();
uint32_t cell = (address-m_segment.baseAddress())/4;
// Implement the VCI target FSM
switch (r_vci_fsm) {
case IDLE:
if ( ! p_vci.cmdval.read() )
break;
/*
* We only accept 1-word request packets
* and we check for segmentation violations
*/
if ( ! p_vci.eop.read() ||
! m_segment.contains(address) )
r_vci_fsm = ERROR_RSP;
else {
switch (p_vci.cmd.read()) {
case VCI_CMD_READ:
r_buf_value = r_contents[cell];
r_contents[cell] = true;
r_vci_fsm = READ_RSP;
break;
case VCI_CMD_WRITE:
r_contents[cell] = false;
r_vci_fsm = WRITE_RSP;
break;
default:
r_vci_fsm = ERROR_RSP;
break;
}
}
r_buf_srcid = p_vci.srcid.read();
r_buf_trdid = p_vci.trdid.read();
r_buf_pktid = p_vci.pktid.read();
r_buf_eop = p_vci.eop.read();
break;
// In those states, we only wait for response to be accepted.
case WRITE_RSP:
case READ_RSP:
case ERROR_RSP:
if ( p_vci.rspack.read() )
r_vci_fsm = IDLE;
break;
}
}
tmpl(void)::genMoore()
{
// This is an helper function defined in the VciTarget port definition
p_vci.rspSetIds( r_buf_srcid.read(), r_buf_trdid.read(), r_buf_pktid.read() );
// Depending on the state, we give back the expected response.
switch (r_vci_fsm) {
case IDLE:
p_vci.rspNop();
break;
case WRITE_RSP:
p_vci.rspWrite( r_buf_eop.read() );
break;
case READ_RSP:
p_vci.rspRead( r_buf_eop.read(), r_buf_value.read() );
break;
case ERROR_RSP:
p_vci.rspError( r_buf_eop.read() );
break;
}
// We only accept commands in Idle state
p_vci.cmdack = (r_vci_fsm == IDLE);
}
}}
Component instanciation could be (template_inst.cc):
#include "caba/target/vci_locks.cc" template class soclib::caba::VciLocks<soclib::caba::VciParams<4,1,32,1,1,1,8,1,1,1> >;
Command line:
g++ -c -o obj.o -I/path/to/soclib/systemc/src -I/path/to/soclib/systemc/include template_inst.cc -I/path/to/systemc $(OTHER_CFLAGS)
Attachments (7)
- tlmt_figure_2.png (17.3 KB ) - added by 18 years ago.
- tlmt_figure_4.png (21.5 KB ) - added by 18 years ago.
- tlmt_figure_3.png (59.0 KB ) - added by 18 years ago.
- tlmt_figure_5.png (7.2 KB ) - added by 18 years ago.
- tlmt_figure_1.png (18.7 KB ) - added by 18 years ago.
- tlmt_vgmn.png (33.3 KB ) - added by 17 years ago.
- tlmt_initiator_target.png (10.2 KB ) - added by 17 years ago.
Download all attachments as: .zip

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}