
| Version 4 (modified by , 19 years ago) ( diff ) |
|---|
Writing efficient TLM-T SystemC simulation models for SoCLib
Authors : Alain Greiner, François Pécheux, Emmanuel Viaud, Nicolas Pouillon
A) Introduction
This document describes the modeling rules for writing TLM-T SystemC simulation models for SoCLib. Those rules enforce the PDES (Parallel Discrete Event Simulation) principles. Each PDES process involved in the simulation has is own, local time, and processes synchronize through timed messages. Models complying with those rules can be used with the "standard" OSCI simulation engine (SystemC 2.x), but can be used also with others simulation engines, especially distributed, parallelized simulation engines.
Besides you may also want to follow the general SoCLib rules.
B) Single VCI initiator and single VCI target
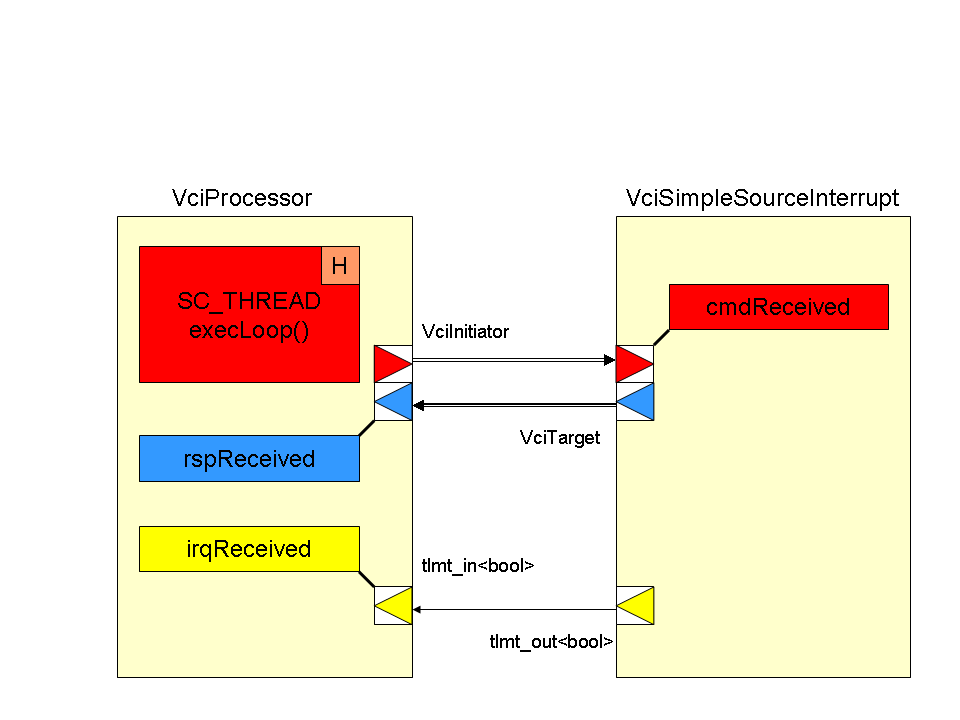
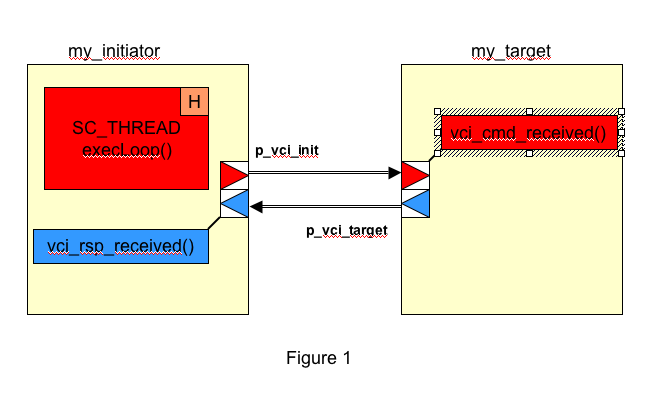
Figure 1 presents a minimal system containing one single initiator, and a single target. In the proposed example, the initiator module doesn't contains any parallelism, and can be modeled by a single SC_THREAD, describing a single PDES process. The activity of the my_initiator module is described by the SC_THREAD execLoop(), that contain an infinite loop. The variable m_time represents the PDES process local time.
Contrary to the initiator, the target module has a purely reactive behaviour. There is no need to use a SC_THREAD to describe the target behaviour : A simple method is enough.
The VCI communication channel is a point-to-point bi-directionnal channel, encapsulating two separated uni-directionnal channels : one to transmit the VCI command packet, one to transmit the VCI response packet.
C) Initiator Modeling
In the proposed example, the initiator module is modeled by the my_initiator class. This class inherit the BaseModule class, that is the basis for all TLM-T modules. As there is only one thread in this module, there is only one member variable time of type tlmt_time. This object can be accessed through the getTime(), addTime() and setTime() methods.
The execLoop() method, describing the initiator activity must be declared as a member function of the my_initiator class.
Finally, the class my_initiator must contain a member variable p_vci, of type VciInitiatorPort. This object has a template parameter <vci_param> defining the widths of the VCI ADRESS & DATA fields.
C.1) Sending a VCI command packet
To send a VCI command packet, the execLoop() method must use the cmdSend() method, that is a member function of the p_vci port. The prototype is the following:
void cmdSend(vci_cmd_t *cmd, // VCI command packet
sc_time time); // initiator local time
The informations transported by a VCI command packet are defined below:
class vci_cmd_t {
vci_command_t cmd; // VCI transaction type
vci_address_t *address; // pointer to an array of addresses on the target side
uint32_t *be; // pointer to an array of byte_enable signals
bool contig; // contiguous addresses (when true)
vci_data_t *buf; // pointer to the local buffer on the initiator
uint32_t length; // number of words in the packet
bool eop; // end of packet marker
uint32_t srcid; // SRCID VCI
uint32_t trdid; // TRDID VCI
uint32_t pktid; // PKTID VCI
}
The possible values for the cmd fied are VCI_CMD_READ, VCI_CMD_WRITE, VCI_CMD_READLINKED, and VCI_CMD_STORECONDITIONAL Le champ address contient un ensemble d’adresses valides dans l’espace mémoire partagé du système modélisé. The contig field can be used for optimisation.
The cmdSend() function is non-blocking. To implement a blocking transaction (such as a cache line read, where the processor is blocked during the VCI transaction), the model designer must use the wait() method, that is a member function of the VciInitiatorPort class. The execLoop() thread is suspended; It will be activated when the response packet is received by the notify() method, that is also a member function of the VciInitiatorPort.
C.2) Receiving a VCI response packet
C.3) Initiator Constructor
C.4) Lookahead parameter
C.5) TLM-T initiator example
template <typename vci_param>
class my_initiator : Tlmt::BaseModule {
public:
VciInitiatorPort <vci_param> p_vci;
//////// constructor
my_initiator (sc_module_name name,
uint32_t initiatorIndex
uint32_t lookahead) :
p_vci(“vci”, this, &my_initiator::rspReceived, &m_time),
BaseModule(name),
m_time(0),
{
m_index = InitiatorIndex;
m_lookahed = lookahead;
m_counter = 0;
SC_THREAD(execLoop);
} // end constructor
private:
tlmt_Time m_time; // local clock
uint32_t m_index; // initiator index
uint32_t m_counter; // iteration counter
uint32_t m_lookahed; // lookahead value
vci_param::data_t m_data[8]; // local buffer
vci_cmd_t m_cmd; // paquet VCI commande
//////// thread
void execLoop()
{
while(1) {
…
m_cmd.cmd = VCI_CMD_READ;
p_vci.cmdSend(&m_cmd, m_time.getTime()); // lecture bloquante
p_vci.wait();
…
m_cmd.cmd = VCI_CMD_WRITE;
p_vci.send(VCI_CMD_WRITE,…);
p_vci.cmdSend(&m_cmd, m_time.getTime()); // écriture non bloquante
...
// lookahead management
m_counter++ ;
if (m_counter >= m_lookahead) {
m_counter = 0 ;
wait(SC_ZERO_TIME) ;
} // end if
m_time.addtime(1) ;
} // end while
} // end execLoop()
//////////////// call-back function
void rspReceived(vci_cmd_t *cmd, sc_time rsp_time)
{
if(cmd == VCI_CMD_READ) {
m_time.set_time(rsp_time + length);
p_vci.notify() ;
}
} // end rspReceived()
} // end class my_initiator
D) Target Modeling
D.1) Receiving a VCI command packet
D.2) Sending a VCI response packet
D.3) Target Constructor
D4) TLM-T target example
Cible TLM-T
template <typename vci_param>
class my_target : Tlmt::BaseModule {
public:
VciTargetPort<vci_param> p_vci;
////////////// constructor
my_target ( sc_module_name name,
uint32_t targetIndex,
sc_time latency):
p_vci(“vci”,this, &my_target::cmdReceived),
BaseModule(name)
{
m_latency = latency;
m_index = targetIndex;
} // end constructor
private:
vci_param::data_t m_data[8]; // local buffer
sc_time m_latency; // target latency
uint32_t m_index; // target index
vci_rsp_t m_rsp; // paquet VCI réponse
/////////////// call-back function
sc_time cmdReceived( vci_cmd_t *cmd,
sc_time cmd_time)
{
if(cmd->cmd == VCI_CMD_WRITE) {
for(int i = 0 ; i < length ; i++) m_data[i] = cmd->buf[i];
}
if(cmd->cmd == VCI_CMD_READ) {
for(int i = 0 ; i < length ; i++) cmd->buf[i] = m_data[i];
}
m_rsp.srcid = cmd->srcid;
m_rsp.trdid = cmd->trdid;
m_rsp.pktid = cmd>pktid;
m_rsp.length = cmd->length;
m_rsp.error = 0;
rsp_time = cmd_time + latency;
p_vci.rspSend(&m_rsp, rsp_time) ;
return (rsp_time + (sc_time)cmd->length);
} // end cmdReceived()
} // end class my_target
Attachments (7)
- tlmt_figure_2.png (17.3 KB ) - added by 19 years ago.
- tlmt_figure_4.png (21.5 KB ) - added by 19 years ago.
- tlmt_figure_3.png (59.0 KB ) - added by 19 years ago.
- tlmt_figure_5.png (7.2 KB ) - added by 18 years ago.
- tlmt_figure_1.png (18.7 KB ) - added by 18 years ago.
- tlmt_vgmn.png (33.3 KB ) - added by 17 years ago.
- tlmt_initiator_target.png (10.2 KB ) - added by 17 years ago.
Download all attachments as: .zip

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}