
| Version 93 (modified by , 18 years ago) ( diff ) |
|---|
Writing TLM2.0-compliant timed SystemC simulation models for SoCLib
Authors : Alain Greiner, François Pêcheux, Aline Vieira de Mello
A) Introduction
This document is still under development.
It describes the modeling rules for writing TLM-T SystemC simulation models for SoCLib that are compliant with the new TLM2.0 OSCI standard. These rules enforce the PDES (Parallel Discrete Event Simulation) principles. In the TLM-T approach, we don't use the SystemC global time, as each PDES process involved in the simulation has its own local time. PDES processes (implemented as SC_THREADS) synchronize through messages piggybacked with time information. Models complying to these rules can be used with the "standard" OSCI simulation engine (SystemC 2.x) and the TLM2.0 library, but can also be used also with others simulation engines, especially distributed, parallelized simulation engines.
The examples presented below use the VCI/OCP communication protocol selected by the SoCLib project, but the TLM-T approach described here is very flexible, and is not limited to the VCI/OCP communication protocol.
The interested user should also look at the general SoCLib rules.
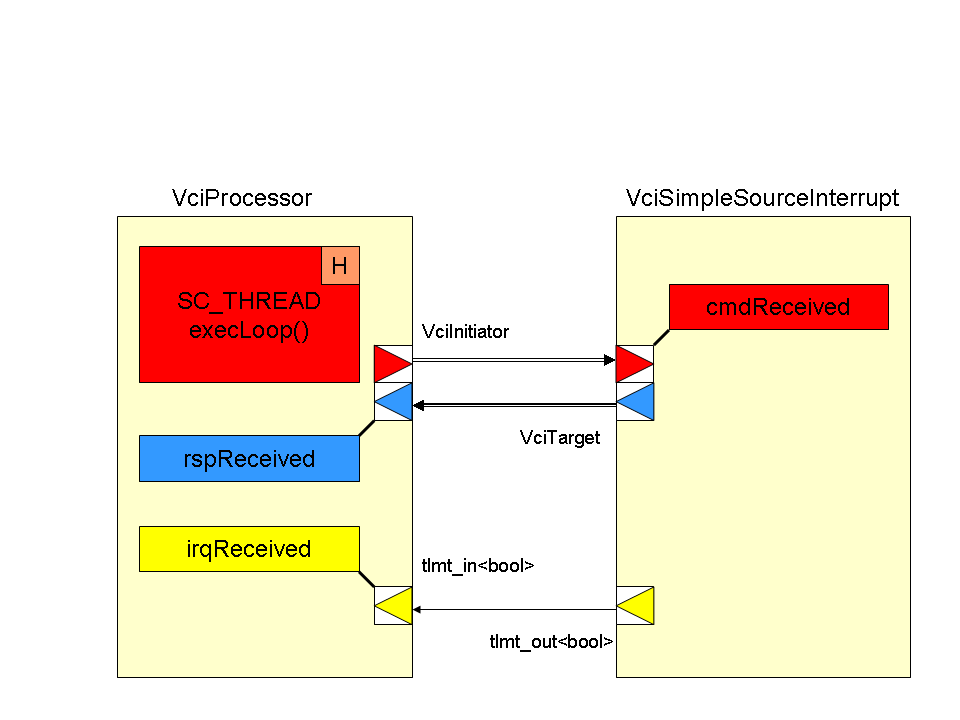
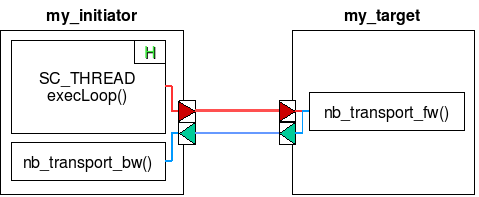
B) VCI initiator and VCI target
Figure 1 presents a minimal system containing one single VCI initiator, my_initiator , and one single VCI target, my_target . The initiator behavior is modeled by the SC_THREAD execLoop(), that contains an infinite loop. The interface function vci_rsp_received() is executed when a VCI response packet is received by the initiator module.
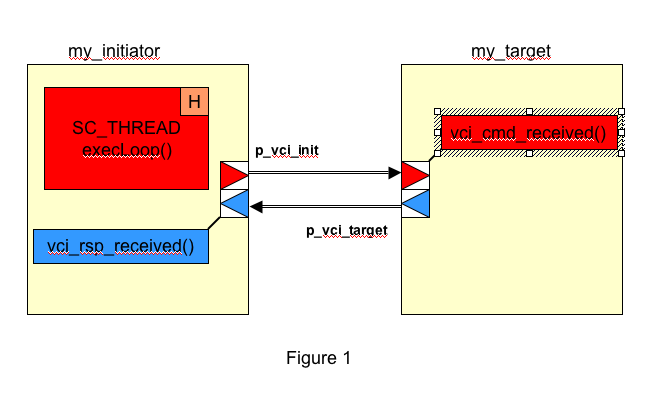
Unlike the initiator, the target module has a purely reactive behaviour and is therefore modeled as a simple interface function. In other words, there is no need to use a SC_THREAD for a target component: the target behaviour is entirely described by the interface function vci_cmd_received(), that is executed when a VCI command packet is received by the target module.
The VCI communication channel is a point-to-point bi-directional channel, encapsulating two separated uni-directional channels: one to transmit the VCI command packet, one to transmit the VCI response packet.
C) VCI Transaction in TLM-T
The TLM2.0 standard allows the user to redefine both the payload and the phases of the transactions. Two classes have been defined in soclib_vci_types : a tlmt_vci_payload and a tlmt_phase".
The payload of a tlmt_vci_payload contains three groups of information:
- TLM2.0 generic fields
- TLM-T specific fields
- VCI specific fields
class tlmt_vci_payload { ... private: // TLM2.0 related fields and common structure sc_dt::uint64 address; unsigned char* data; unsigned char* byte_enable; unsigned int length; tlm::tlm_response_status response_status; unsigned int streaming_width; // TLM-T related fields bool* activity_status_ptr; sc_core::sc_time* local_time_ptr; // VCI related fields vci_param::cmd_t cmd; vci_param::srcid_t srcid; vci_param::trdid_t trdid; vci_param::pktid_t pktid; };
The TLM2.0 compliant accessors allow to set the TLM2.0 related fields, such as the address, the data & byte enable arrays pointers and its associated size in bytes.
Dedicated VCI accessors are used to define the VCI payload type, that can either be set_read() (for VCI read command), set_write() (for VCI write command),set_locked_read() (for VCI atomic locked read), and set_store_cond() (for VCI atomic store conditional). The set_srcid(), set_trdid() and set_pktid() functions respectively set the VCI source, thread and packet identifiers.
NB : The char array approach defined by TLM2.0 can degrade the simulation speed, as the existing SoCLib models use uint32_t arrays to model both the embedded memories and the caches... Experiments are currently in progress to evaluate the performance degradation incurred by this char <-> uint formatting. It is therefore possible that the types of the data and byte_enable fields of the tlmt_vci_payload will be changed to uint32* .
D) VCI initiator Modeling
D.1) Member variables & methods
In the proposed example, the initiator module is modeled by the my_initiator class. This class inherits from the standard SystemC sc_core::sc_module class, that acts as the root class for all TLM-T modules.
The initiator local time is contained in a member variable named m_local_time, of type sc_core::sc_time. The local time can be accessed with the following accessors: addLocalTime(), setLocalTime() and getLocalTime().
sc_core::sc_time m_local_time; // the initiator local time ... void addLocalTime(sc_core::sc_time t); // add an increment to the local time void setLocalTime(sc_core::sc_time& t); // set the local time sc_core::sc_time getLocalTime(void); // get the local time
The boolean member variable m_activity_status indicates if the initiator is currently active. It is used by the arbitration threads contained in the vci_vgmn interconnect, as described in section F. The corresponding access functions are setActivity() and getActivity().
bool m_activity_status; ... void setActivity(bool t); // set the activity status (true if the component is active) bool getActivity(void); // get the activity state
The execLoop() method, describing the initiator behaviour must be declared as a member function.
The my_initiator class contains a member variable p_vci_init, of type tlmt_simple_initiator_socket, representing the VCI initiator port.
It must also define an interface function to handle the VCI response packets.
D.2) Sending a VCI command packet
To send a VCI command packet, the execLoop() method must use the nb_transport_fw() method, defined by TLM2.0, that is a member function of the p_vci_init port. The prototype of this method is the following:
tlm::tlm_sync_enum nb_transport_fw
( soclib_vci_types::tlm_payload_type &payload, // payload
soclib_vci_types::tlm_phase_type &phase, // phase (TLMT_CMD)
sc_core::sc_time &time); // local time
The first argument is a pointer to the payload, the second represents the phase, and the third argument contains the initiator local time. The return value is not used in this TLM-T implementation.
The nb_transport_fw() function is non-blocking. To implement a blocking transaction (such as a cache line read, where the processor is stalled during the VCI transaction), the model designer must use the SystemC sc_core::wait(x) primitive (x being of type sc_core::sc_event): the execLoop() thread is then suspended, and will be reactivated when the response packet is actually received.
D.3) Receiving a VCI response packet
To receive a VCI response packet, an interface function must be defined as a member function of the class my_initiator. This function (named vci_rsp_received() in the example), must be linked to the p_vci_init port, and is executed each time a VCI response packet is received on the p_vci_init port. The function name is not constrained, but the arguments must respect the following prototype:
tlm::tlm_sync_enum vci_rsp_received
( soclib_vci_types::tlm_payload_type &payload, // payload
soclib_vci_types::tlm_phase_type &phase, // phase (TLMT_RSP)
sc_core::sc_time &time); // response time
The return value (type tlm::tlm_sync_enum) is not used in this TLM-T implementation, and must be sytematically set to tlm::TLM_COMPLETED.
In the general case, the actions executed by the interface function depend on both the phase argument, and on the transaction types (defined in the payload). For sake of simplicity, the interface function proposed below does not make any distinction between transaction types.
D.4) Initiator Constructor
The constructor of the class my_initiator must initialize all the member variables, including the p_vci_init port. The vci_rsp_received() function being executed in the context of the thread sending the response packet, a link between the p_vci_init port and this interface function must be established.
The constructor for the p_vci_init port must be called with the following arguments:
p_vci_init.register_nb_transport_bw(this, &my_initiator::vci_rsp_received);
D.5) Lookahead parameter
The SystemC simulation engine behaves as a cooperative, non-preemptive multi-tasks system. Any thread in the system must stop execution after at some point, in order to allow the other threads to execute. With the proposed approach, a TLM-T initiator will never stop if it does not execute blocking communication (such as a processor that has all code and data in the L1 caches).
To solve this issue, it is necessary to define -for each initiator module- a lookahead parameter. This parameter defines the maximum number of cycles that can be executed by the thread before it is descheduled. The lookahead parameter allows the system designer to bound the de-synchronization time interval between threads.
A small value for this parameter results in a better timing accuracy for the simulation, but implies a larger number of context switches, and a slower simulation speed.
D.6) VCI initiator example
////////////////////////// my_initiator.h ////////////////////////////////
#include "tlm.h" // TLM headers
#include "tlmt_transactions.h" // TLM-T headers
#include "tlmt_simple_initiator_socket.h" // TLM-T initiator socket
#include "mapping_table.h" // mapping Table
class my_initiator // my_initiator
: public sc_core::sc_module // inherit from SC module base clase
{
private:
typedef soclib::tlmt::VciParams<uint32_t,uint32_t,4> vci_param;
//////////////////////
// Member Variables
//////////////////////
uint32_t m_srcid;
soclib::common::MappingTable m_mt;
uint32_t m_counter;
uint32_t m_lookahead;
sc_core::sc_time m_local_time;
bool m_activity_status;
sc_core::sc_event m_rsp_event;
soclib_vci_types::tlm_payload_type m_payload;
soclib_vci_types::tlm_phase_type m_phase;
///////////////////////
// Member Functions
///////////////////////
void execLoop(void); // initiator thread
bool getActivity(void); // get the activity state
void setActivity(bool t); // set the activity status (true if the component is active)
sc_core::sc_time getLocalTime(void); // get the local time
void setLocalTime(sc_core::sc_time& t); // set the local time
void addLocalTime(sc_core::sc_time t); // add a value to the local time
tlm::tlm_sync_enum vci_rsp_received // interface function to receive VCI response
( soclib_vci_types::tlm_payload_type &payload, // payload
soclib_vci_types::tlm_phase_type &phase, // phase
sc_core::sc_time &time); // time
protected:
SC_HAS_PROCESS(my_initiator);
public:
/////////////////
// ports
/////////////////
tlmt_simple_initiator_socket<my_initiator,32,soclib_vci_types> p_vci_init; // VCI initiator port
//constructor
my_initiator( // constructor
sc_core::sc_module_name name, // module name
const soclib::common::IntTab &index, // index of mapping table
const soclib::common::MappingTable &mt, // mapping table
uint32_t lookahead); // lookahead
};
////////////////////////// my_initiator.cpp ////////////////////////////////
/////////////////
// Constructor
/////////////////
my_initiator::my_initiator
( sc_core::sc_module_name name, // module name
const soclib::common::IntTab &index, // index of mapping table
const soclib::common::MappingTable &mt, // mapping table
uint32_t lookahead) // lookahead
: sc_module(name), // init module name
m_mt(mt), // mapping table
p_vci_init("socket") // vci initiator socket name
{
// link the interface function the TLM-T INITIATOR SOCKET
p_vci_init.register_nb_transport_bw(this, &my_initiator::vci_rsp_received);
// initiator identification
m_srcid = mt.indexForId(index);
//lookahead control
m_counter = 0;
m_lookahead = lookahead;
//initialize the local time
m_local_time = 0 * UNIT_TIME;
// initialize the activity variable
setActivity(true);
// register thread process
SC_THREAD(execLoop);
}
//////////////////////
// Access Functions
//////////////////////
bool my_initiator::getActivity() { return m_activity; }
my_initiator::setActivity(bool t) { m_activity = t; }
sc_core::sc_time my_initiator::getLocalTime() { return m_local_time; }
my_initiator::setLocalTime(sc_core::sc_time t) { m_local_time = t; }
my_initiator::addLocalTime(sc_core::sc_time t) { m_local_time += t; }
///////////////////////
// thread
///////////////////////
my_initiator::execLoop(void)
{
uint32_t address = 0x10000000;
uint32_t data_int = 0xAABBCCDD;
unsigned char data[4];
unsigned char byte_enable[4];
int nbytes = 4;
for(int i=0; i<nbytes; i++) byte_enable[i] = tlm::TLM_BYTE_ENABLED;
while ( true ) {
// increase local time
addLocalTime(10 * UNIT_TIME);
// prepare payload (including int to char translation)
m_payload.itoa(data_int, data, 0);
m_payload.set_write();
m_payload.set_address(address);
m_payload.set_byte_enable_ptr(byte_enable);
m_payload.set_data_ptr(data);
m_payload.set_data_length(nbytes);
m_payload.set_srcid(m_srcid);
m_payload.set_trdid(0);
m_payload.set_pktid(0);
// set the phase
m_phase= soclib::tlmt::TLMT_CMD;
// send the VCI command packet...
p_vci_initiator->nb_transport_fw(m_payload, m_phase, m_local_time);
// thread is descheduled, waiting for the response
wait(m_rsp_event);
// lookahead management
m_counter++ ;
if (m_counter >= m_lookahead) {
m_counter = 0 ;
wait(sc_core::SC_ZERO_TIME) ;
}
} // end while
} // end execLoop()
///////////////////////////////////////////////////////////////
// Interface Function to receive the response packet
///////////////////////////////////////////////////////////////
tlm::tlm_sync_enum my_initiator::vci_rsp_received
( soclib_vci_types::tlm_payload_type &payload, // payload
soclib_vci_types::tlm_phase_type &phase, // phase
sc_core::sc_time &time // time
)
{
switch(phase){
case soclib::tlmt::TLMT_RSP :
setLocalTime(time);
m_rsp_event.notify(0 * UNIT_TIME);
break;
case soclib::tlmt::TLMT_INFO :
payload.set_local_time_ptr(&m_localTime);
payload.set_activity_ptr(&m_activity);
break;
}
return tlm::TLM_COMPLETED;
} // end vci_rsp_received()
E) VCI target modeling
In this example, the my_target component handles all VCI command types in the same way, and there is no error management.
E.1) Member variables & methods
The class my_target inherits from the class sc_core::sc_module. The class my_target contains a member variable p_vci_target of type tlmt_simple_target_socket, representing the VCI target port. It contains an interface function to handle the received VCI command packets, as described below.
E.2) Receiving a VCI command packet
To receive a VCI command packet, an interface function must be defined as a member function of the class my_target. This function (named vci_cmd_received() in the example), is executed each time a VCI command packet is received on the p_vci_target port. The function name is not constrained, but the arguments must respect the following prototype:
tlm::tlm_sync_enum vci_cmd_received
( soclib_vci_types::tlm_payload_type &payload, // payload
soclib_vci_types::tlm_phase_type &phase, // phase (TLMT_CMD)
sc_core::sc_time &time); // time
The return value (type tlm::tlm_sync_enum) is not used in this TLM-T implementation, and must be sytematically set to tlm::TLM_COMPLETED.
E.3) Sending a VCI response packet
To send a VCI response packet the call-back function vci_cmd_received() uses the nb_transport_bw() method, defined by TLM2.0, that is a member function of the class tlmt_simple_target_socket, and has the same arguments as the nb_transport_fw() function. Respecting the general TLM2.0 policy, the payload argument refers to the same tlmt_vci_payload object for both the nb_transport_fw() and nb_transport_bw() functions, and the associated interface functions. Only two values are used for the response_status field in this TLM-T implementation:
- TLM_OK_RESPONSE
- TLM_GENERIC_ERROR_RESPONSE
For a reactive target, the response packet time is computed as the command packet time plus the target intrinsic latency.
tlm::tlm_sync_enum vci_cmd_received (
soclib_vci_types::tlm_payload_type &payload,
soclib_vci_types::tlm_phase_type &phase,
sc_core::sc_time &time)
{
...
payload.set_response_status(soclib::tlmt::TLM_OK_RESPONSE);
phase = soclib::tlmt::TLMT_RSP;
time = time + (nwords * UNIT_TIME);
p_vci_target->nb_transport_bw(payload, phase, time);
}
E.4) Target Constructor
The constructor of the class my_target must initialize all the member variables, including the p_vci_target port. The vci_cmd_received() function being executed in the context of the thread sending the command packet, a link between the p_vci_target port and the call-back function must be established. The my_target constructor must be called with the following arguments:
p_vci_target.register_nb_transport_fw(this, &my_target::vci_cmd_received);
E.5) VCI target example
////////////////////////// my_target.h ////////////////////////////////
#include "tlm.h" // TLM headers
#include "tlmt_transactions.h" // TLM-T headers
#include "tlmt_simple_target_socket.h" // TLM-T SOCKET
#include "mapping_table.h"
#include "soclib_endian.h"
class my_target
: public sc_core::sc_module
{
private:
typedef soclib::tlmt::VciParams<uint32_t,uint32_t,4> vci_param;
///////////////////////
// Member variables
///////////////////////
uint32_t m_targetid;
soclib::common::MappingTable m_mt;
//////////////////////
// Interface Function
//////////////////////
tlm::tlm_sync_enum vci_cmd_received
( soclib_vci_types::tlm_payload_type &payload, // payload
soclib_vci_types::tlm_phase_type &phase, // phase
sc_core::sc_time &time); // time
protected:
SC_HAS_PROCESS(my_target);
//////////////////////
// ports
//////////////////////
public:
tlmt_simple_target_socket<my_target,32,soclib_vci_types> p_vci_target;
/////////////////////
// constructor
/////////////////////
my_target(sc_core::sc_module_name name,
const soclib::common::IntTab &index,
const soclib::common::MappingTable &mt);
};
////////////////////////// my_target.cpp ////////////////////////////////
/////////////////////
// constructor
/////////////////////
my_target::my_target
( sc_core::sc_module_name name,
const soclib::common::IntTab &index,
const soclib::common::MappingTable &mt)
: sc_module(name),
m_mt(mt),
p_vci_target("p_vci_target")
{
// link the interface function to the VCI port
p_vci_target.register_nb_transport_fw(this, &my_target::vci_cmd_received);
m_targetid = m_mt.indexForId(index);
}
//////////////////////
// Interface function
//////////////////////
tlm::tlm_sync_enum my_target::vci_cmd_received
( soclib_vci_types::tlm_payload_type &payload, // payload
soclib_vci_types::tlm_phase_type &phase, // phase
sc_core::sc_time &time) // time
{
int nwords = payload.get_data_length() / vci_param::nbytes;
switch(payload.get_command()){
case soclib::tlmt::VCI_READ_COMMAND:
case soclib::tlmt::VCI_WRITE_COMMAND:
case soclib::tlmt::VCI_LOCKED_READ_COMMAND:
case soclib::tlmt::VCI_STORE_COND_COMMAND:
payload.set_response_status(tlm::TLM_OK_RESPONSE);
break;
default:
payload.set_response_status(tlm::TLM_GENERIC_ERROR_RESPONSE);
break;
}
phase = soclib::tlmt::TLMT_RSP
time = time + (nwords * UNIT_TIME);
p_vci_target->nb_transport_bw(payload, phase, time);
return tlm::TLM_COMPLETED;
}
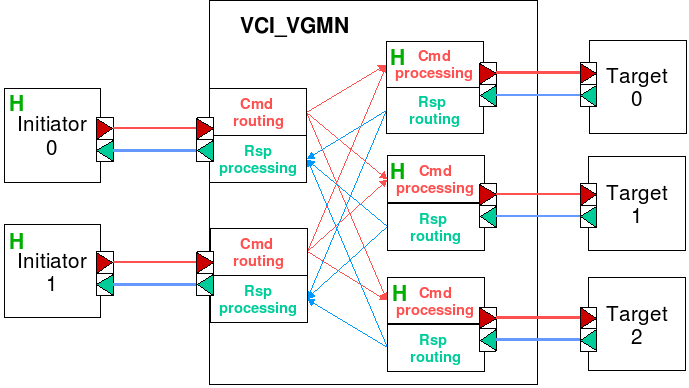
F) VCI Interconnect modeling
The VCI interconnect used for the TLM-T simulation is a generic interconnection network, named VciVgmn. The two main parameters are the number of initiators, and the number of targets. In TLM-T simulation, we don't want to reproduce the detailed, cycle-accurate, behavior of a particular interconnect. We only want to simulate the contention in the network, when several VCI intitiators try to reach the same VCI target.
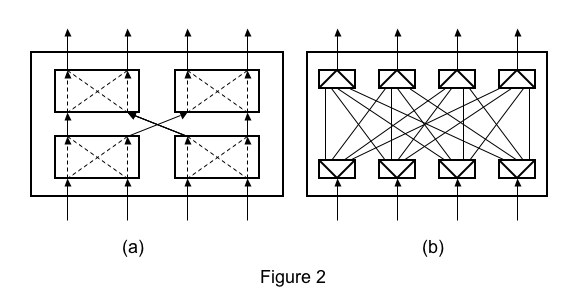
In a physical network such as the multi-stage network described in Figure 2.a, conflicts can appear at any intermediate switch.
The VciVgmn network, described in Figure 2.b, is modeled as a cross-bar, and conflicts can only happen at the output ports. It is possible to specify a specific latency for each input/output couple. As in most physical interconnects, the general arbitration policy for each output port is round-robin.
F.1) Generic network modeling
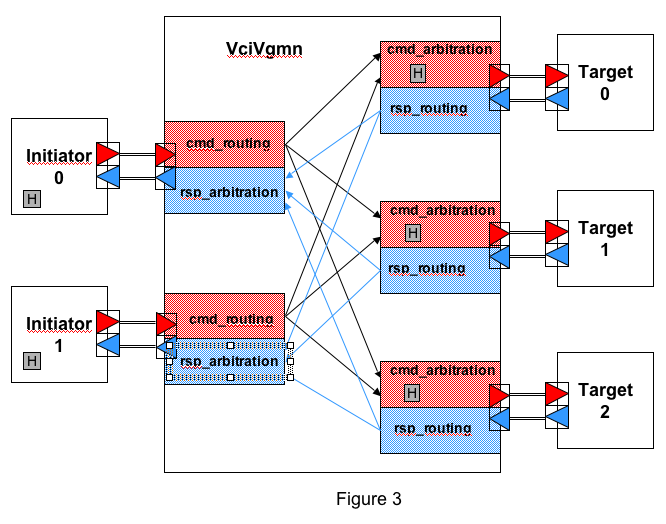
There is actually two fully independent networks for VCI command packets and VCI response packets. There is a routing function for each input port, and an arbitration function for each output port, but the two networks are not symmetrical :
- For the command network, the arbitration policy is distributed: there is one arbitration thread for each output port (i.e. one arbitration thread for each VCI target). Each arbitration thread is modeled by a SC_THREAD, and contains a local time. This time represents the target local time.
- For the response network, there are no conflicts, and there is no need for arbitration. Therefore, there is no thread (and no local time) and the response network is implemented by simple function calls.
This is illustrated in Figure 3 for a network with 2 initiators and three targets :
F.2) Arbitration Policy
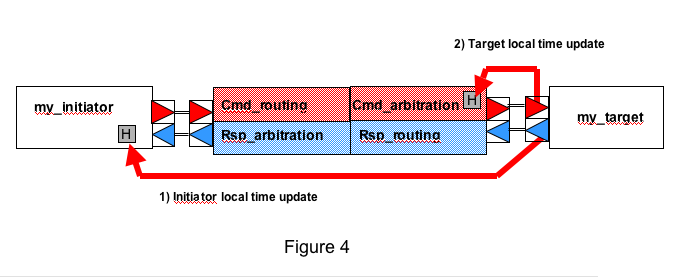
As described above, there is one cmd_arbitration thread associated to each VCI target. This thread is in charge of selecting one timed request between all possible requesters, and to forward it to the target. According to the PDES principles, the arbitration thread must select the request with the smallest timestamp. The arbitration process must take into account the actual state of the VCI initiators: For example a DMA coprocessor that has not yet been activated will not send request and should not participate in the arbitration process. As a general rule, each VCI initiator must define an active boolean flag, defining if it should participate to the arbitration. This active flag is always set to true for general purpose processors. Any arbitration thread receiving a timed request is resumed. It must obtain an up to date timing & activity information for all its input channels before making any decision. To do that, the m_local_time and m_activity_status variables of all VCI initiators are considered as public variables, that can be accessed (read only) by all arbitration threads. The arbitration policy is the following : The arbitration thread scans all its input channels, and selects the smallest time between the active initiators. If there is a request, this request is forwarded to the target, and the arbitration thread local time is updated. If there is no request from this initiator, the thread is descheduled and will be resumed when it receives a new request.
For efficiency reasons, in this implementation, each arbitration thread constructs - during elaboration of the simulation - two local array of pointers (indexed by the input channel index) to access the m_local_time and m_activity_status variables of all VCI initiators. To get this information, each arbitration thread uses the nb_transport_bw() function on all its VCI target ports, with a dedicated value for the phase called soclib::tlmt::TLMT_INFO. The payload argument refers to the same tlmt_vci_payload object as the two other phase values (soclib::tlmt::TLMT_CMD and soclib::tlmt::TLMT_RSP).
for (size_t i=0;i<m_nbinit;i++) {
phase = soclib::tlmt::TLMT_INFO;
m_RspArbCmdRout[i]->p_vci->nb_transport_bw(payload, phase, rspTime);
m_array[i].ActivityStatus = payload.get_activity_ptr();
m_array[i].LocalTime = payload.get_local_time_ptr();
}
As the net-list of the simulated platform mus be explicitely defined before constructing the LocalTime and ActivityStatus arrays, the vgmn hardware component provides an utility function fill_time_activity_arrays() that must be called in the SystemC top-cell, before starting the simulation.
Attachments (7)
- tlmt_figure_2.png (17.3 KB ) - added by 19 years ago.
- tlmt_figure_4.png (21.5 KB ) - added by 19 years ago.
- tlmt_figure_3.png (59.0 KB ) - added by 19 years ago.
- tlmt_figure_5.png (7.2 KB ) - added by 18 years ago.
- tlmt_figure_1.png (18.7 KB ) - added by 18 years ago.
- tlmt_vgmn.png (33.3 KB ) - added by 17 years ago.
- tlmt_initiator_target.png (10.2 KB ) - added by 17 years ago.
Download all attachments as: .zip

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}