
Cosimulation using SoCLib components and RTL models
You may use CABA models together with RTL models using ModelSim. This needs the following parts:
- a set of SystemC models
- a set of Verilog/VHDL models
- glue wrappers where needed, exporting a RTL model to SystemC or SystemC to RTL (scgenmod to export RTL model to SystemC but this is not covered in this guide)
- a SystemC clock driver (we had some issues with vhdl clock driver), i.e. a module bagotting clock signal
SystemC modules are SoCLib ones and are usually compiled with SoCLib-cc. They come with pure-c++ dependancies which must be linked together with the modules.
Due to its simulator core design, ModelSim has to compile SystemC
modules a special way, and has a dedicated tool to compile SystemC/C++
files: sccom.
Soclib-cc has three main jobs:
- Select modules and dependancies from a platform description file,
- Explicitly instantiate C++ templates,
- Call the C++ compiler. Only this step is implemented in
sccom, - Call the vhdl or verilog compiler:
vcomandvlog.
The flow is as in the picture:
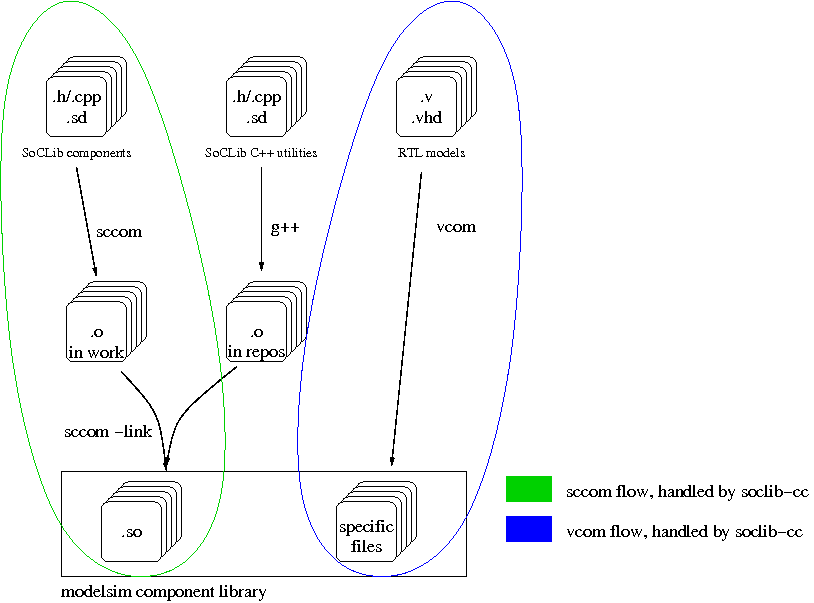
soclib-cc handles most of this automagically if correctly configured. This guide explains how to set things up.
Moreover, the C/C++ only dependancies are not
directly compileable with the dedicated ModelSim tool, but can be
injected at the last time, for the linkage phase (sccom -link).
How to configure SoCLib-cc to call ModelSim compiler driver
Sometimes, the C++-only dependencies of SystemC modules need to Know about SystemC types. Therefore, SystemC includes must be available.
soclib-cc needs new configuration sections for
- the compiler used by sccom
- the path to ModelSim's SystemC implementation
- used flags
- object file names pattern in sccom
workdirectory
For all these, we must create 3 new configurations in soclib-cc's configuration file:
- a compiler
- a SystemC library
- a build environment
# Definition of the compiler used for ModelSim-usable SoCLib components.
# We use sccom for components compilation and linkage, gcc/g++ for utilities
config.modelsim_toolchain = Toolchain(
parent = config.toolchain,
# Must use this.
tool_SCCOM_CC = 'sccom',
tool_SCCOM_CXX = 'sccom',
tool_CC = '/users/soft/mentor/modelsim-6.5c/modeltech/bin/gcc',
tool_CXX = '/users/soft/mentor/modelsim-6.5c/modeltech/bin/g++',
tool_CC_LINKER = 'sccom',
tool_CXX_LINKER = 'sccom',
tool_VHDL = 'vcom',
tool_VERILOG = 'vlog',
# Modelsim cant do parallel builds :'(
max_processes = 1,
# No cflags are needed, sccom forces them
cflags = ['-m32'],
# Special features, it has a -link invocation needed at end...
libs = ['-link'],
# VHDL compilation flags
vflags = ['-05', '-quiet', '-check-synthesis'],
)
# Definition of the ModelSim SystemC implementation. Must modify the
# path according to the ModelSim current installation.
config.libsystemc_modelsim = Library(
name = 'systemc',
# This special vendor attributes enables some quirks in soclib-cc
vendor = 'modelsim',
# This is the path of the produced .o files when compiled with sccom.
# You have to try it by hand, and adapt
sc_workpath = "work/_sc/linux_gcc-4.1.2",
# Empty useless variables
libs = [],
# cflags have to be deducted from actual invocation
# Try using sccom -v by hand
cflags = ['-I/users/soft/mentor/modelsim-6.5c/modeltech/include/systemc',
'-I/users/soft/mentor/modelsim-6.5c/modeltech/include',
'-I'+config.path+'/soclib/lib/include'],
)
# Definition of a new build environment, which can be referenced with 'soclib-cc -t'
config.modelsim = BuildEnv(
parent = config.build_env,
toolchain = config.modelsim_toolchain,
libraries = [config.libsystemc_modelsim],
# Where temporary files lies, beware that if you set a global path,
# you'll need a mechanism to make user-unique directories.
repos = "/tmp/",
)
SystemC modules in ModelSim limitations
All modules that may be used from the outside of the SystemC-part
(from RTL or from GUI) have to be declared with a special macro
(SC_MODULE_EXPORT).
There is no sc_main() function in modelsim-based simulators. The top
module must be a sc_module with no interfaces. This probably needs a
rewrite of your netlists. (Note: If you use DSX-generated netlists,
this is done transparently)
Component Metadata
RTL modules, exactly like their caba counterparts, have their own metadata files. Caba modules can use RTL ones as dependancies.
Usage
Now we configured soclib-cc, we can compile a complete SystemC system.
Let's have an example system with two basic components communicating through a fifo.
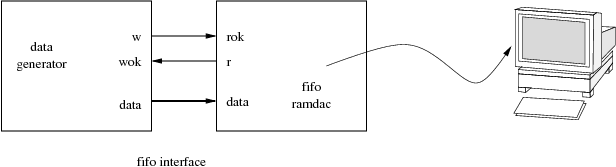
We'll use
- SoCLib SystemC Fifo Ports,
- a VHDL
fifo_gencomponent, - a VHDL-SystemC
fifo_gen_wrapperwrapper, - a SystemC
fifo_wrapperhosting a pure-C++.
This basic system has to be modeled as the following tree:
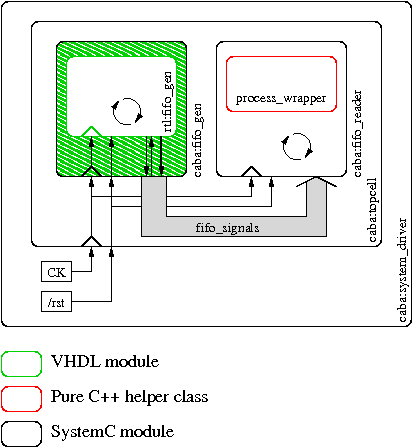
It contains:
rtl:fifo_gen- The VHDL component writing to the Fifo
caba:fifo_gen-
The VHDL/SystemC wrapper to export
fifo_gento the SystemC world caba:fifo_reader- A SystemC component reading from the fifo
caba:topcell- A SystemC component implementing the topcell
caba:system_driver-
A SystemC component controlling
resetandclocksignals
In order to simulate this system we need to:
- Reset the work directory, to make sure,
$ rm -rf work transcript modelsim.ini vsim.wlf
- Initialize modelsim
workdirectory,$ vlib work $ vmap work work
- Compile the SystemC system driver with soclib-cc, all dependancies are pulled with it.
.sdmetadata are needed (even for the VHDL/SystemC wrapper and VHDL modules), see in tarball.$ soclib-cc -1 caba:system_driver -t modelsim -v -o sccom-link.o
- Open modelsim with the platform
$ vsim -sclib work system_driver
See the attached tarball for the complete example
Attachments (7)
- cosim-pf1.fig (3.4 KB ) - added by 16 years ago.
- cosim-pf1.png (9.9 KB ) - added by 16 years ago.
-
cosim.tar.bz2
(3.5 KB
) - added by 16 years ago.
Complete example
- cosim-pf2.png (9.4 KB ) - added by 16 years ago.
- soclib-cc-modelsim-flow.png (14.4 KB ) - added by 16 years ago.
- soclib-cc-modelsim-flow.fig (5.6 KB ) - added by 16 years ago.
- cosim-pf2.fig (4.4 KB ) - added by 16 years ago.
Download all attachments as: .zip

{kind=link}
{kind=link}
{kind=link}